Gleichungskonstruktor
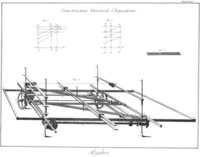

Der Rowningsche Gleichungskonstruktor. Abbildung aus der Encyclopedie von d'Alembert und Diderot
Gleichungskonstruktor nach Rowning
Diderot und D'Alembert berichten in ihrer L'Encyclopedie im Fachgebiet Algebra von einem Universellen Gleichungskonstrukteur, einem analogen Rechengerät zur Auswertung von Polynomen bis zum dritten Grad. Das Gerät war im Jahre 1768 von dem Briten John Rowning der Londoner Royal Society vorgestellt worden. Die Funktionsweise beruht auf der geometrischen Konstruktion der gesuchten Zahlenwerte. Für eine Gleichung zweiten Grades soll hier diese Konstruktion erläutert werden.
 Schema des Gleichungskonstruktors
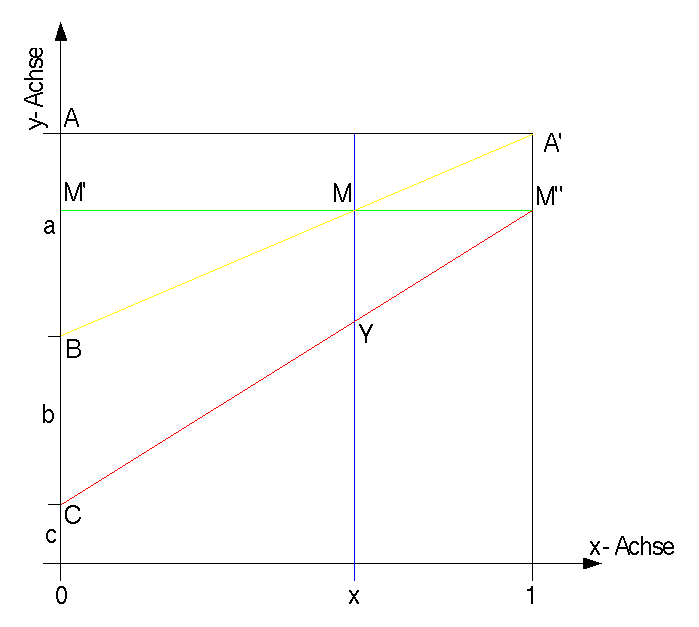
Schema des Gleichungskonstruktors
Der Koeffizienten des Polynoms
f(x)=ax^2+bx+c
werden benutzt, um in einem kartesischen Koordinatensysstem die Punkte
C:=(0,c), B:=(0,c+b) und A:=(0,c+b+a)
zu definieren. Außerdem benutzt man den Punkt
A':=(1, c+b+a).
Das Dreieck \Delta BAA' ist das Steigungsdreieck der Gerade BA'. Mit der Steigung
{\overline{BA} \over \overline{AA'}} = {a\over 1} = a
lautet also die Geradengleichung:
y=ax+(b+c)
Für ein gewähltes x wird der Punkt
M:=(x,ax+b+c)
definiert, sowie die Punkte
M':=(0,ax+b+c) und M'':=(1,ax+b+c).
Das Dreieck \Delta CM'M'' ist das Steigungsdreieck der Geraden CM''. Mit der Steigung
{\overline{CM'}\over \overline{M'M''} } =
{{\overline{OM'}-\overline{OC}}\over 1 }=
{ax+b+c-c} =
{ax+b}
ergibt sich also die Geradengleichung
y = (ax+b)x+c=ax^2+bx+c.
Damit ist insbesondere der Punkt
Y:=(x,ax^2+bx+c)
definiert, dessen y-Koordinate der gesuchte Wert des Polynoms ist.
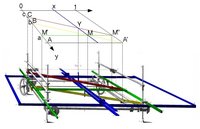
Die mechanisierte Konstruktion dieser geometrischen Vorgehensweise erfordert demnach die folgende Bedienung: Zunächst wird der Parameter c eingestellt, indem das gesamte Gerät so auf der Unterlage platziert wird, dass Punkt C an der Koordinate (0,c) zu liegen kommt. Insbesondere bei der Ablesung des Polynomwertes zum Schluss mittels Visierfaden und Schiebeskala muss dieser verschobene Wert c berücksichtigt werden. Dann wird der Parameter b eingestellt, indem das eine Ende der in der Zeichnung gelb hervorgehobenen Schiene im Abstand b vom Punkt C festgeklemmt wird. Der Parameter a wird nicht im Punkt A sondern im Punkt A', also am anderen Ende der gelben Schiene durch Festklemmen eingestellt. Für die Auswertung des Polynoms wird dann mit dem blau hervorgehobenen Rahmen die gewünschte x-Koordinate eingestellt. Die verkantungsfreie Parallelbewegung wird durch zwei kleinere auf einer gemeinsamen Achse sitzende Zahnräder sichergestellt. An diesem blauen Rahmen befestigt befinden sich an der eingestellten x-Position zwei Schienen, die sich längs - also in y-Richtung - verschieben lassen. Eine Zapfen auf dieser längsverschiebbaren Schiene greift in die festgeklemmte gelbe Schiene und lässt also mit einer Bewegung in x-Richtung des blauen Rahmens die blaue Schiene samt Zapfen gleichzeitig in y-Richtung der gelben Gerade folgen. Ein Fortsatz desselben Zapfens nach oben greift in die Schiene eines H-förmigen Bauteils, das sich parallel in y-Richtung verschieben lässt. Auch hier ist die verkantungsfreie Parallelbewegung durch zwei größere, auf einer gemeinsamen Achse sitzende Zahnräder sichergestellt. Die grüne Gleitschiene korrespondiert mit der Geraden M'M'' der Skizze. Im Punkt M'' Auf dieser grünen Schiene ist drehbar und verschiebbar das eine Ende einer weiteren roten Gleitschiene befestigt. Das andere Ende der roten Gleitschine ist drehbar im Punkt C befestigt. Ein Zapfen auf einer weiteren unabhängigen blauen Schiene wird durch die Rote Gleitschiene im Punkt Y positioniert. Die y-Koordinate dieses obersten blauen Zapfens wird mit Hilfe eines gespannten Fadens und den Skalen, an dem er befestigt ist, bestimmt.
Stefan Drechsler 16:31, 25. Sep 2005 (IST)
Patente:
- Patent:ITFI940083 06.11.1995 Conti, Franco und Frediani, Aldo : Macchina Generatrice di Polinomi
Nach dem
Urheberrechtsgesetz dürfen Sie
Inhalte des Rechnerlexikons
ohne Veränderung zitieren, sofern Sie
die Quelle angeben.![[Hauptseite]](/upload/wiki.png)
 Hauptseite
Hauptseite



 Eine geometrische Wurzelbehandlung Ausführliche Beschreibung der Maschine und ihrer Geschichte
Eine geometrische Wurzelbehandlung Ausführliche Beschreibung der Maschine und ihrer Geschichte